
میکروکنترلر AVR
عنوان پاورپوینت : آشنایی با میکروکنترلر AVR
قالب بندی : پاورپوینت
قیمت : رایگان
شرح مختصر : ریزکنترلگر یا میکروکنترلر ، مدار مجتمع کوچکی است که از یک CPU کوچک و اجزای دیگری نظیر نوسان ساز کریستالی، تایمر، درگاههای ورودی و خروجی آنالوگ و دیجیتال و حافظه تشکیل شده است. در واقع یک ریزپردازنده در درون ریزکنترلگر. قرار داده شده است که ریزکنترلگر با استفاده. از آن میتواند محاسبات منطقی و حسابی را انجام دهد.
معماری پایه AVR توسط دو دانشجوی دانشگاه Norwegian Institute of Technology ارائه شد. این میکروکنترلرهای هشت بیتی به دلیل قابلیت برنامه نویسی توسط کامپایلر زبان های برنامه نویسی سطح بالا بسیار مورد توجه قرار می گیرند. یکی از مشخصات این نوع ریزکنترلگرها دارا بودن ۳۲ ثبات همه منظوره است. همچنین در این میکروکنترلرها، از حافظههای کم مصرف و غیر فرار FLASH و EEPROM استفاده میشود.
نرم افزار دیگرCodevision می باشد که این نرم افزار از زبان برنامه نویسی C استفاده می کند و نیز نرم افزار AVR studio که برنامه نوشته شده در این نرم افزار به زبان اسمبلی می باشد . این نرم افزار دارای یک شبیه ساز کامل برای میکرو های AVR می باشد .
فهرست :
تعریف میکروکنترلر
معماری AVR
انواع AVR
کامپایلرها
مشخصات میکروکنترلر AVR-Mega16
انواع نرم افزارهای برنامه نویسی AVR
معرفی نرم افزار Bascom AVR
تفاوت Bascom با دیگر نرم افزارها
شکل ظاهری کامپایلر AVR Bascom
خبرنامه پس از کامپایل شدن به صورت Hex
روجی های نرم افزار Bascom AVR
معرفی نرم افزار برنامه نویسیAVR Studio
شکل ظاهری نرم افزار Studio AVR
عملکرد کلی نرم افزارAVR Bascom
نمونه نقشه و برد پروگرمر
نمونه پروژه های اجرا شده
منابع

آزمایشگاه معماری
عنوان جزوه : آزمایشگاه معماری
قالب بندی : PDF
قیمت : رایگان
شرح مختصر : ازساده ترین گیت های منطقی مثل And , or,xor ,…. ساخته میشوند تا به مدارهای منطقی مجتمع یاهمان IC ها برسد که متشکل ازچندین گیت های ساده میباشند. با پچیده ترشدن مدارهای منطقی مجتمع یا همان IC ها برسند که متشکل ازچندین بیت های ساده می باشند. با پچیده ترشدن مدارهای منطقی دیجتال قابل برنامه ریزی به نام PLA ارائه شده اند وبعد ازآن مدارهای قابل برنامه ریزی PLA ,PLD نیزبه بازار عرضه شدند وبلاخره مدارهای پچیده تر قابل برنامه ریزی FPGA,CPLD ساخته شده اند.
FPGA, CPLD براساس سلول های منطقی قابل برنامه ریزی طراحی شده اند که ارتباط بین این سلول ها نیز قابل برنامه ریزی میباشد. چون FPGA,CPLD ازنظر برنامه ریزی و کاربرد مشابه به هم هستند. دربرخی نوشته ها CPLD را نوعی FPGA می نامند. اولین FPGA به وسیله ی شرکت Xilinx ارائه شده ازآن زمان به بعد FPGA های متفاوتی توسط شرکت های مختلف ارائه میشوند.
فهرست :
مدارهای منطقی با دیجتال
نرم افزار ISE
انواع گیت های منطقی
مدارهای منطقی ترکیبی
دی مالتی پلکسر
دستور ورود مدارمنطقی
لیست حساسیت process
برنامه نویسی برای مالتی پلکسر
ساختار مدار ترتیبی وترکیبی
مدار مقایسه کننده
مقایسه کننده ۴ بیتی
مدارات منطقی سنگرون

پایداری فازی
عنوان مقاله : بررسی پایداری فازی در پلاریزاسیون فیبر نوری با پردازش سیگنال متعامد
قالب بندی : Word
قیمت : رایگان
شرح مختصر : یک محقق پس از انتخاب و تعیین موضوع تحقیق باید به دنبال تعیین روش تحقیق باشد. شیوهی انجام دادن هر کار و یا طرز اجرای هر هدف و برنامه را «روش» مینامند. در این فصل از تحقیق با در نظر گرفتن موضوع تحقیق که بررسی پایداری فازی در پلاریزاسیون فیبر نوری با پردازش سیگنال متعامدبه بررسی پارامترهای مدنظر طراحی و همچنین تجزیه و تحلیل قطبیت و پلاریزاسیون فیبر نوری می¬پردازیم.
برقراری ارتباط مسیله ای مهم برای انسان به شمار می آید به چرا که نخستین بار برای برقراری ارتباط از شیوه هایی مثل آتش و و یا انعکاس نور خورشید توسط آیینه استفاده می شده است و همچنین از نظایر آن بهره می برده است روش استفاده از جو برای انتقال نور یکی از روش های ابتدایی در مهندسی مخبرات برای ایجاد ارتباطات بود. استفاده از لوله و کانال برای هدایت نور در داخل آن با لاستفاده از عدس فیبر های نوری ، محیطی شفاف برای انتشار برای انتشار نور هستند وشیشه ، محیطی شفاف و کم تضعیف است که در مخابرات نوری کاربرد بسزایی دارد و همچنین آینه یکی از روش های مهندسی ارتباطات می باشد . در مهندسی مخابرات تمام انتقالهای رادیویی و آنتنهای دریافت پلاریزه میشوند. مخصوصا وقتی که در یک رادار اکثر آنتنها پلاریزاسیون دایرهای عمودی یا افقی را منعکس میکند
فهرست :
مقدمه
روش تحقیق
پاشندگی حالت پلاریزاسیون
PMD
تأخیر تفاضلی گروهی
کوپلینگ حالت پلاریزاسیون
اتلاف توان در فیبر به واسطه پلاریزاسیون
جبران PMD
انواع روش های قطبش
شرایط ایجاد قطبش بیضوی
روش تولید قطبش بیضیوار
روش گردآوری اطلاعات
سیگنال متعامد
پارامتر های پلاریزاسیون
دلایل پاشندگی
پاشندگی مواد
پاشندگی موجبر
پروتئوس
عنوان پروژه : گزارش کار و شبیه سازی ۱۶ پروژه مدار با پروتئوس
قالب بندی : DSN, XLS, PDF
قیمت : رایگان
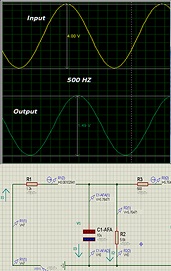
شرح مختصر : در این بخش مجموعه گزارش کارهای دو درس آزمایشگاه مدار الکتریکی و آزمایشگاه مدار الکترونیکی در قالب pdf و xlsx تهیه شده و همچنین توسط نرم افزار قدرتمند Proteus 7 Professional به شبیه سازی این مدارات پرداخته شده است که امیدوارم مورد توجه شما قرار بگیرد .
مباحث مطرح شده در کلاس آزمایشگاه مدار الکتریکی:
* بررسی مقاومت و تشخیص مقدار آن ها از شکل ظاهری مقاومت
* آزمایش خطی بودن مقاومت ها (قانون اهم)
* قانون تقسم ولتاژ KVL
* قانون تقسیم جریان KCL
* آزمایش یافتن بهترین مقاومت برای داشتن بیشترین توان (حداکثر توان)
* یافتن مقاومت تونن از مقادیر ولتاژ و جریان – مقاوت معادل تونن Rth
* قضیه جمع آثار
* شارژ و تخلیه خازن
* خازن در مدار های DC و AC
مباحث مطرح شده در کلاس آزمایشگاه مدار الکتریکی:
* یکسو کردن سیگنال توسط دیود
* ایجاد ریپل در سیگنال توسط دیود
* بررسی کامل ترانزیستور در مدارات DC
* بررسی کامل ترانزیستور در مدارت AC

تلوزیون
عنوان پاورپوینت : اصول سیستم های تلوزیون
قالب بندی : PPTX
قیمت : رایگان
شرح مختصر : مبدل سیگنال ویدئو به تصویر را لامپ تصویر می نامند. به عبارت روشن تر وظیفه لامپ تصویر تبدیل اطلاعات الکتریکی به اطلاعات نوری است. برای این کار لامپ تصویر یک شعاع الکترونی بسیار باریک تهیه کرده آن را بر روی یک صفحه حساس نسبت به نور می اندازد. تعداد الکترون های این شعاع الکترونی متناسب با سیگنال تصویر می باشد و شدت روشنایی تصویر متناسب با تعداد الکترون های شعاع الکترونی است.
اگر سیگنال ویدئو با پلاریتۀ منفی باشد،این سیگنال بایستی به شبکهی کنترل وصل گردد (یعنی سیگنال ویدئو مثبت است) .و اگر سیگنال ویدئو دارای پلاریته ی مثبت باشد ،بایستی به کاتد متصل شود ،زیرا در این مورد صورت اگر دامنه سیگنال و یدئو زیاد شود،کاتد نسبت به آند مثبت تر شده و از شدت اشعه کاسته می شود و در نتیجه صفحه سیاهتر می شود . در واقع هرچه ولتاژ کاتد زیادتر شود اشعه ی کمتری منتشر می گردد پس سیگنال ویدئوی منفی به کاتد متصل می گردد.
سیگنال های حامل رنگ در سیستم NTSC ،روی دامنۀ متغیر سیگنال Y قرار می گیرند؛ در صورتی که سیگنال های با برست روی دامنۀ ثابت نشانۀ عقبی قرار داد .بنابراین در اثر تقویت ناهمگون این دو سیگنال در گیرنده ، و یا بعد انعکاس امواج فرستنده ،اختلاف فازی ما بین حاملهای رنگ و برست بوجود می آید که این اختلاف فاز بصورت رنگ روی صحنه ظاهر شده و رنگهای غیر واقعی را بوجودمی آورد .برای رفع این نقیصۀ سیستم NTSC ،کوششهایی بعمل آمد که منجر به بوجود آمدن سیستمهای جدید پال و سکام شد سیستم پال ، در آلمان اختراع و کامل گردید و اصول آن مشابه سیستمهای NTSC می باشد.
فهرست :
لامپ اشعه کاتدی یا لامپ پروان CRT
نور و رنگ
اصول سه رنگی
اصول مدولاسیون رنگ
سیستم N.T.S.C
سیستم سکام و پال
مدارات همزمانی (سنکرونیزاسیون)
سیگنال مرکب تصویر (ویدئو)
سیستم ارسال سطر در میانی تصویر
چگونی جریان بوبین های انحراف افقی و عمودی درگیرنده
مدولاسیون
اصول مدولاسیون رنگ
مدولاسیون با باند جانبی اضافی
ساختمان لامپها
باندهای فرکانسی و آنتن ها
بررسی مدارات گیرندۀ تلویزیون
تیونر و بررسی چگونگی کار آن
طبقه It تصویر
طبقه آشکار ساز تصویر
طبقه آشکارساز صوت
تقویت صوت و بلندگو
سیستم کنترل بهره AGC
طبقه جدا کننده علائم همزمانی

کنترلر فازی
عنوان پروژه : کنترل موقعیت و زاویه پاندول معکوس با استفاده از کنترلر فازی
قالب بندی : PDF, simulink
قیمت : رایگان
شرح مختصر : طراحی کنترل کننده و بررسی پایداری مدل پاندول معکوس بعلت غیر خطی بودن همیشه از موضوعات مطرح در کنترل بوده است.در این مقاله، یک کنترل کننده کلاسیک از نوع PD با روش تنظیم پارامتر زیگلر-نیکولز برای کنترل زاویه پاندول و یک کنترل کننده فازی از نوع ممدانی برای کنترل موقعیت گاری و زاویه پاندول طراحی شده اند که نتیجه ای که گرفته شده است این است که کنترل کلاسیک زمانی که زاویه کوچک باشد خطای حالت ماندگار صفر دارد ولی وقتی زاویه افزایش پیدا می کند خطای حالت ماندگار دادرد ولی کنترل کننده فازی با کم و زیاد شده زاویه خطای حالت ماندگار نخواهد داشت و سیستم غیر خطی را بدون خطی سازی کنترل می کند
فهرست :
مقدمه
روش
معادلات دینامیکی و مدل سازی سیستم
شبیه سازی در MATLAB
پاسخ مدار باز سیستم به ورودی ضربه
طراحی کنترلر کلاسیک PD برای کنترل زاویه پاندول
طراحی کنترل کننده فازی برای موقعیت گاری و زاویه پاندول
تعریف متغیرهای کلامی و توابع عضویت
قواعد فازی کنترلرها
شبیه سازی حلقه بسته سیستم و کنترلر فازی
نتایج
منابع و ماخذ

کاربرد شبکه های عصبی
عنوان مقاله : کاربرد شبکه های عصبی در کنترل
قالب بندی : PDF
قیمت : رایگان
شرح مختصر : با وجود کنترل کلاسیک وکنترل مدرن چه لزومی به استفاده از شبکه عصبی یا روش های محاسبات نرم در کنترل وجود دارد؟ در واقع همیشه این امکان وجود ندارد که رابطه بین ورودی و خروجی با ریاضی کلاسیک بیان شود و همچنین همیشه این وجود ندارد که یک مدل خطی بدست آورد. مدل های غیر خطی به خوبی مدل های سیستم های غیر خطی درک نشده اند.روش هایی برای بعضی از سیستم های غیر خطی ساده تر وجود دارد. شبکه های عصبی روش مفیدی برای کنترل سیستم های غیر خطی پیچیده ارائه می دهد ،زیرا نیازی به مدل سیستم ندارد.
فهرست :
مقدمه
در چه حالت های در کنترل یک سیستم باید به سمت روش های محاسبات نرم برویم؟
مراحل پیشرفت روش های کنترل سیستم ها
کدامیک از کاربرد های شبکه عصبی در کنترل سیستم ها استفاده می شود؟
مهمترین نوع شبکه عصبی که در کنترل استفاده می شود چیست؟
کاربرد شبکه عصبی پرسپترون چند لایه در کنترل MLP
مهترین معماری های شبکه عصبی برای کنترل سیستم ها
نمونه کلی از کاربرد شبکه های عصبی در MPC
شباهت سیستم های عصبی با مدل های غیر خطی
طرح اولیه مدل پیش بین گام اول براساس شبکه عصبی BP
تفاوت کنترل با NARMA–L2 با کنترل PID برای کنترل پایداری در موتور DC تحریک جداگانه
مثالی از کنترل کاربرد نروکنترلر مدل مرجع در Simulink
تنظیم پارامترهای کنترلر PID با استفاده از شبکه عصبی