عنوان مقاله : طراحی کنترلر کلاسیک ،کنترل مدرن و کنترل بهینه برای مدل تابع تبدیل در حالت های زمان پیوسته و زمان گسسته و مقایسه آنها در محیط کد نویسی در MATLAB
قالب بندی : PDF
قیمت : رایگان
شرح مختصر : در این تحقیق برای مدل تابع تبدیل کنترل کلاسیک و کنترل مدرن و کنترل بهینه را در دو حالت زمان پیوسته و زمان گسسته طراحی شده است. ابتدا کنترل PID پیوسته طراحی شده و سپس PID دیجیتال ، و سپس رفتار سیستم نسبت به دو حالت مقایسه شده است.و در مرحله بعد کنترل فیدبک حالت و مشاهده گر و کنترل فیدبک با مشاهده گر طراحی شده است و حالت های سیستم را با مشاهده گر مقایسه شده اند و تاثیر نویز و تغییر پارامتر ها روی رفتار سیستم بررسی شده است. و سپس کنترل فیدبک حالت زمان گسسته ،مشاهده گر آن و کنترل فیدبک حالت زمان گسسته همراه با مشاهده گر طراحی شده اند و حالت های سیستم را با مشاهده گر مقایسه شده اند. واثر نویز و تغییر پارامتره را روی این طراحی ها بررسی شده است و در آخر کنترل فیدبک حالت بهینه با تابع هزینه دلخواه طراحی شده است و رفتار سیستم با این طراحی را در حضور نویز بررسی شده است. و نتیجه ای که گرفته ایم این است که کنترل PID در حذف نویز از سایر طراحی ها موفق تر بوده است.و کنترل قیدبک حالت نسبت به تغییر پارامترهای سیستم مقاوم تر بوده است و از نظر سرعت رسیدن به حالت مانا،SVFC سریعترین پاسخ را داشته است .
فهرست :
طراحی کنترل کننده PID زمان پیوسته
ﻧﻮﺷﺘﻦ ﻣﻌﺎدﻻت ﺣﺎﻟﺖ ﺳﯿﺴﺘﻢ
ﻃﺮاﺣﯽ ﮐﻨﺘﺮﻟﺮ PID ﺑﺎ اﺳﺘﻔﺎده از روش astrom
نمودار های حوزه فرکانس کنترلر طراحی شده
ترسیم ورودی کنترلی به Plant
بررسی رفتار سیستم در حضور نویز و تغییر پارامترهای سیستم
نویز ثابت
نویز سینوسی
تغییر پارامتر
طراحی کنترلر دیجیتال PID
طراحی کنترل کننده PID با استفاده از روش astrom
نمودارهای حوزه فرکانس کنترل کننده طراحی شده
ورودی کنترلی به plant
بررسی رفتار سیستم در حضور نویز و تغییر پارامترها ی سیستم
نویز ثابت
نویز سینوسی
تغییر پارامتر
مقایسه عملکرد PID دیجیتال و PID زمان پیوسته
کنترل فیدبک حالت و مشاهده گر
طراحی SVFC
طراحی مشاهده گر
ترسیم حالت های سیستم و تخمین آنها
طراحی SVFC با مشاهده گر مرتبه کامل
بررسی رفتار سیستم با حضور نویز و تغییر پارامترهای سیستم
نویز ثابت
نویز سینوسی
تغییر پارامتر های سیستم
مقایسه ورودی کنترلی SVFC با ورودی کنترلیSVFC ومشاهده گر
مقایسه SVFC با PID
طراحی FTSC ، FTSC FTSO
تبدیل سیستم به سیستم دیجیتال و استخراج معادلات حالت آن
طراحی FTSC
طراحی FTSO و ترسیم حالت های سیستم و تخمین انها و خطای آنها
طراحی مشاهده گر دیجیتال و ترسیم حالت ها و تخمین ها
ترسیم حالت های سیستم و تخمین آنها زمان پیوسته و زمان گسسته در یک نمودار
طراحی FTSFTSO
بررسی رفتار سیستم در حضور نویز
نویز ثابت
نویز سینوسی
نویز سفید
بررسی رفتار سیستم با تغییر پارامترهای سیستم
بررسی ورودی کنترلی FTSC با ورودی کنترلی FTSCFTSO
مقایسه FTSC با کنترلر PID دیجیتال طراحی شده در بخش دوم
کنترل بهینه
طراحی SVFC بهینه
رفتار سیستم در حضور نویز
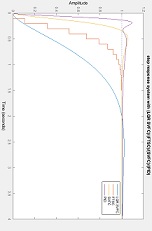
مقایسه پاسخ پله سیستم با طراحی های LQR ،SVFC ،FTSC ،PID
نتیجه گیری

عنوان پایان نامه : ارائه مدل مقایسه ای بر پایه ارزیابی عملکرد روشهای تشخیص و تفکیک عیوب متداول جعبه دنده ها
قالب بندی : PDF
قیمت : رایگان
شرح مختصر : امروزه پایش وضعیت تولیدات مکانیکی مخصوصاً ماشین های دوار ، به منظور بالا بردن سطح کیفی و اطمینان از صحت عملکرد آنها ، کاربرد زیادی پیدا کرده است . در این راستا سیستم های مبتنی بر هوش مصنوعی به طور گسترده ای برای یافتن عیوب پیش آمده مورد استفاده قرار گرفته اند . ولی پراکندگی موجود در انواع روش های بکارگرفته شده ، انتخاب یک روش کاربردی را مشکل ساخته است . به همین علت در این پژوهش مطالعه ای بر روی طیف وسیعی از این روش ها که اغلب در سال های اخیر مطرح شده اند ، صورت گرفته است .همچنین در رابطه با پیشینه و تئوری آنها مطالبی بیان شده است . سپس برای یافتن راهکاری مناسب ، مزایا و معایب هر روش در جدول هایی گردآوری شده و در نهایت تحت یک مدل مقایسه ای ارزیابی شده اند . تلاش شده این مزایا و معایب بر پایه ی مکتوبات و مستندات سال های اخیر جمع آوری شود . نتایج نشان می دهد که برای یافتن عیوب یک چرخ دنده ، بکار گیری سیگنال ارتعاشی و آنالیز موجک بسته ای به همراه روش PCA برای انتخاب ویژگی های موثر و شبکه ی عصبی برای تفکیک عیوب ، بسیار مناسب می باشد . در پایان این پژوهش برای یافتن سلامت چرخ دنده ی یک جعبه دنده ی نمونه از توالی روش های گفته شده استفاده گردیده و نتایج آن نشان داده شده است
فهرست :
فصل اول: مقدمه
مقدمه
اهمیت موضوع تحقیق
ضرورت انجام تحقیق
مراحل انجام تحقیق
روشهای موجود و نحوه انجام تحقیق
فصل دوم : کلیات تحقیق
بخش اول : پیشینه تحقیق
مقدمه
روش های پردازش سیگنال
روش های حوزه زمان
روش های حوزه فرکانس
روش های زمان فرکانس
روش های مبتنی بر هوش مصنوعی
بخش دوم : تئوری تحقیق
تئوری تحقیق
نوع سیگنال نمونه برداری ، صوت یا ارتعاش
روش های استخراج ویژگی
روش های حوزه زمان
روش های حوزه فرکانس
روش های زمان فرکانس
تبدیل موجک پیوسته
تبدیل موجک گسسته
تبدیل موجک بسته ای
روش های انتخاب ویژگی
روش الگوریتم ژنتیک
روش IDE
روش PCA
روش های طبقه بندی
روش K نزدیک ترین همسایه
ماشین بردار پشتیبان
شبکه های عصبی
شبکه های شعاع محوری
سیستم استنتاج فازی عصبی تطبیقی
ساختار ANFIS
الگوریتم یادگیری
فصل سوم : ارائه ی مدل مقایسه ای
مقدمه
ضرورت ارائه مدل در روشهای عیب یابی
تفسیر مدل مقایسه ای
گام اول : انتخاب نوع سیگنال برداشت شده ، صوت یا ارتعاش
گام دوم : انتخاب روش استخراج ویژگی به همراه جداول SW
گام سوم : انتخاب روش انتخاب ویژگی به همراه جداول SW
گام چهارم : انتخاب روش طبقه بندی به همراه جداول SW
گام پنجم : ترکیب روشها و مشخص کردن توالی ها
گام ششم : جداول SW سه توالی انتخاب شده
گام هفتم: تحلیل نتایج جداول بر اساس معیارهای هزینه، سرعت ، پیچیدگی و درصد موفقیت
ارائه مدل مقایسه ای یکپارچه در روشهای عیب یابی
فصل چهارم : تجزیه و تحلیل عیوب یک جعبه دنده نمونه
مقدمه
توالی منتخب
داده های نمونه برداری
سیستم داده پرداری
آماده سازی داده ها
استخراج ویژگی
آنالیز موجک بسته ای
بردار ویژگی اولیه
انتخاب ویژگی های موثر
نرمال سازی ویژگی ها
ماتریس ویژگی نهائی
طبقه بندی وضعیت ها
معماری شبکه عصبی
آموزش شبکه
الگوریتم آموزش RP
الگوریتم آموزش SCG
فصل پنجم : نتیجه گیری و پیشنهادات
مراجع

عنوان پاورپوینت : تست های مخرب و غیر مخرب
قالب بندی : پاورپوینت
قیمت : رایگان
شرح مختصر : آزمونهای غیرمخرب به مجموعهای از روشهای ارزیابی و تعیین خواص دستگاهها و قطعات ساخته شده گفته میشود که هیچگونه آسیب یا تغییری در سامانه ایجاد نکنند. در بسیاری از برنامه های تدوین شده توسط سازنده جهت کنترل کیفیت محصولات،از آزمون چشمی به عنوان اولین تست و یا در بعضی موارد به عنوان تنها متد ارزیابی بازرسی ،استفاده می شود.اگر آزمون چشمی بطور مناسب اعمال شود،ابزار ارزشمندی می تواند واقع گردد. بعلاوه یافتن محل عیوب سطحی، بازرسی چشمی می تواند بعنوان تکنیک فوق العاده کنترل پروسه برای کمک در شناسایی مسائل و مشکلات مابعد ساخت بکار گرفته شود. آزمون چشمی روشی برای شناسایی نواقص و معایب سطحی می باشد.نتیجتا هر برنامه کنترل کیفیت که شامل بازرسی چشمی می باشد،باید محتوی یک سری آزمایشات متوالی انجام شده در طول تمام مراحل کاری در ساخت باشد.بدین گونه بازرسی چشمی سطوح معیوب که در مراحل ساخت اتفاق می افتد،میسر میشود.
فهرست :
گروه شماره ۱ – ترک ها (Cracks)
گروه شماره ۲- حفره ها (Cavities)
گروه شماره ۳- آخال توپر (Solid Inclusion)
گروه شماره ۴- ذوب ناقص (Lack of Fusion) و نفوذ ناقص (Lack of Penetration)
گروه شماره ۵- شکل ناقص (Imperfect Shape)
گروه شماره ۶- عیوب متفرقه (Miscellaneous Imperfections)

عنوان پاورپوینت : جوشکاری فراصوتی
قالب بندی : پاورپوینت
قیمت : رایگان
شرح مختصر : موج التراسونیک بطور طبیعی بخشی از صدای خفاشها را تشکیل می دهد حدود ۱۳۰ سال پیش شخصی به نام Rodolphkoling توانست ارتعاشات التراسونیک را تولید نماید . این علم در طی جنگ جهانی اول برای مواجه با زیر دریایی هایی که نیرو دریایی فرانسه را تهدید می کرد توسط پرفسور P.Langevin پیشرفت زیادی کرد . بطور موثر برای جوشکاری فلزات هم جنس وغیر هم جنس وهمچنین غیر فلزات با طرح اتصال روی هم استفاده می شود . دراین روش از روانساز یا فلز پر کننده استفاده نمی شود.
فهرست :
تاریخچه
تعریف جوشکاری
جوشکاری حالت جامد
انواع فرآیندهای جوشکاری حالت جامد
جوشکاری فراصوتی
انرژی مورد نیاز برای جوشکاری فراصوتی
سرعت یا زمان جوشکاری
انواع فرآیندهای فراصوتی
مزایا و معایب
کاربردها

عنوان مقاله : تعمییر و نگهداری دستگاه CNC چوب
قالب بندی : PDF
قیمت : رایگان
شرح مختصر : هدف از این پروژه آشنایی مختصری از ماشین آلات CNC و شناخت اجزای آن و آشنایی با نحوه تعمیر های عمومی و نگه داری های به موقع و مناسب است . که به شرح هر کدام را به صورت جدا گانه و به موقع می پردازیم. امروزه قطعات صنعتی دارای پیچیدگی های هندسی متفاوتی می باشند که فقط با استفاده از ماشین ابزارهایی با دقت بالا قابل تولید اند. با پیشرفت چشمگیری که در صنعت الکترونیک در دهه هفتاد میلادی به وجود آمد بکارگیری مینی کامپیوتر ها در صنعت ماشینکاری مرسوم گردید. به CNC نام گرفتند. به کمک CNC ماشین ابزارهایی که به کمک کامپیوتر هدایت می شدند تدریج دقت مورد نیاز برای تولید قطعات پیچیده و ساخت طراحی های خاص در صنایع مختلف حاصل شد MDF مانند هوافضا و قالب سازی و حتی کار های تولیدی مثل صنایع چوبی اهم از است. با دست یابی به تلرانسهای بسیار دقیق برای تولید یک قطعه تدریجا اندیشه بالاتر بردن سرعت تولید نیز قوت یافت. با ساخت ابزارهایی با سختی زیاد، شرایط برای بالا بردن نر تولید نیز بهبود یافت. تا اینکه امروزه با بکارگیری تکنیکهای ماشینکاری با سرعتهای بالا قطعاتی با تلرانسهای دقیق در زمان بسیار کوتاهی تولید می گردند. برای دست یابی به قابلیت ماشین کاری با سرعتهای بالا می باید در زمینه های مختلف مانند طراحی سازه ای، کنترل ارتعاشات خود برانگیخته، یافتن بهترین نر براده برداری و کنترل حرکت و سرعت در راستای مسیر مورد نظر به پیشرفتهایی دست یافت.
فهرست :
چکیده
مقدمه
مفهوم تعمیر و نگهداری
شناخت اجزای CNC چوب
شاسی
محورها
محور های Y و X
محور Z
اسپیندل موتور ( Spindle Motor )
قدرت
سرعت
ابزار گیر
مورس
ER Collet
تابلو برق
ملحقات
تجهیزات اضافه (لوازم جانبی)
دستگاه مکنده
دستگاه وکیوم
اسکن سه بعدی
تعمیرات و نگهداری های عمومی
اهداف از ایجاد یک سیستم صحیح تعمیر و نگهداری
تعیین وضعیت موجود دستگاه
شاسی
وضعیت ظاهری دستگاه
راه اندازی
صدا های غیر مجاز
لرزش (ارتعاش)
سیستم برق
روغنکاری دستگاه
وظایف روزانه اپراتور دستگاه
منابع

عنوان پروژه : طراحی توربین های پلتن
قالب بندی : پاورپوینت
قیمت : رایگان
شرح مختصر : توربین پلتون (Pelton wheel) یا همان چرخ پلتون توسط شخصی به نام پلتون ( Lester Allan Pelton) در سال ۱۹۸۰ میلادی اختراع شده است. این توربین یکی از انواع توربین های ضربه ای می باشد که معمولا با وارد شدن ضربه توسط آبی که از ارتفاع به پره های توربین برخورد می کند ، چرخش صورت می گیرد.
فهرست :
موارد استفاده توربین های پلتن
انرژی مبادله شده در یک توربین پلتن
اندازه های اصلی در روتور توربین پلتن
چرخ توربین پلتن ایده ال
چرخ توربین پلتن واقعی
تعداد پره های توربین
اندازه های روتور
مراحل طراحی اندازه های یک توربین پلتن

عنوان مقاله : دیفرانسل خودرو و روابط دینامیکی
قالب بندی : PDF
قیمت : رایگان
شرح مختصر : چرخهای اتومبیل با سرعت های متفاوت می چرخند. به ویژه هنگام پیچیدن اتومبیل. چرخ داخلی نسبت به چرخ خارجی مسافت کمتری را طی می کند. از آنجایی که سرعت برابر است با جابجایی تقسیم بر زمان جابجایی، چرخی که مسافت کمتری را طی می کند سرعتش هم کمتر است. البته چرخهای جلو هم نسبت به چرخهای عقب مسیر متفاوتی را طی می کنند. برای چرخهایی که پیشران نیستند و نیروی موتور به آنها منتقل نمی شود مشکلی پیش نمی آید. مانند چرخهای جلو در یک اتومبیل که چرخهای عقب پیشران هستند و یا چرخهای عقب در اتومبیلی که چرخهای جلو پیشران هستند. اما چرخهای پیشران به هم متصل اند بطوریکه یک موتور واحد و یک سیستم انتقال قدرت واحد آنها را به گردش درمی آورد. اگر ماشین دیفرانسیل نداشته باشد، چرخها به همدیگر قفل خواهند شد پس می بایست همیشه با سرعت های برابر گردش کنند. با این شرایط پیچیدن اتومبیل با مشکل مواجه می شود و یکی از چرخها باید روی زمین بلغزد. با وجود چرخهای مدرن امروزی و خیابان های بتنی، نیروی زیادی برای لغزاندن یک چرخ لازم است و این نیرو باید از طریق محور چرخها از یک چرخ به چرخ دیگر منتقل شود که این کار کشش زیادی را بر محور چرخها وارد خواهد کرد.
فهرست :
تاریخچه
دیفرانسیل خودرو و نحوه عمکرد آن
ضررت استفاده از سیستم دیفرانسیل
دیفرانسیل چیست؟
کاهش دور و افزایش گشتاور
تغییر جهت نیرو
تقسیم نیرو بین چرخ ها
تنظیم دور
اجزای سیستم دیفراسیل خودرو
هوزینگ
واشر مسی
دنده پلوس
هرز گرد
دنده پلوس
کرانویل
دیفرانسیل و مشکلات آن
دیفرانسیل باز
دیفرانسیل ها و اصطکاک
حرکت روی لایه نازک یخ
جدا شدن چرخها از زمین
انواع دیفرانسیل
دیفرانسیل لغزش محدود نوع کلاچی
کوپلینگ ویسکوز
دیفرانسیل قفل شدنی و تورسن
دیفرانسیل چرخدنده مخروطی